Recently a longtime Quanser client asked us to help them enhance the capabilities of the Hexakopter –XL, a third party unmanned aerial vehicle (UAV) designed by Mikrokopter in Germany. Our
Unmanned Aerial Vehicle (UAV) team received the Hexakopter –XL in kit form and quickly assembled it. While similar in some ways to our own
Qball UAV, the Hexakopter, as its name implies, has six rotors, instead of the four on the Qball.
The client chose the 6-rotor Hexakopter because they needed a UAV that could carry heavier payloads than traditional four rotor aerial vehicles. This Hexakopter model is rated to carry a load of up to one kilogram. While many in the hobbyist market would adapt UAVs like this to perform aerial photography functions, our client’s mandate to us was to turn it into a heavy-lifting autonomous flying robot!
 |
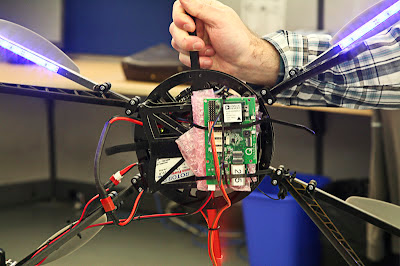
Quanser Systems and Control Engineer John Daly performs a last-minute check
on the enhanced, third party, 6-rotor Hexakopter. |
Once assembled, we put the Hexakopter through its paces to familiarize ourselves with its capabilities. Then we went to work enhancing it to suit the client’s needs. Our first task was to refine its controls. Thanks to
QUARC real-time control prototyping software and
Quanser’s data acquisition hardware, we outfitted the Hexakopter with a
HiQ avionics board, just like the Qball. This allowed us to make use of much of the Qball’s control systems technology and fly the Hexakopter completely autonomously in an indoor environment.
We then proceeded to our second functional enhancement – enabling it to plot a destination. Off the shelf, the Hexakopter comes with the ability to stabilize its own attitude. This means it is able to ensure that it remains roughly level when it is flying, but it is not able to travel to a particular location. By using our own QUARC rapid prototyping control design software, we added this function to the Hexakopter. With this added destination-seeking capability, the Hexakopter will be turned into a fully autonomous flying vehicle that can travel from point A to point B to point C and so on.
 |
A view of the Quanser HiQ avionics board that helped enhance the capabilities
of our client's Hexakopter. |
Working with real-time control design available through QUARC software, and adapting aspects of our proprietary Qball hardware, Quanser control systems engineers played a key role in extending the functionality of the 6-rotor UAV. Our client’s Hexakopter now features advanced functionality and design that is able to satisfy their higher expectations. Who says every task has to begin with a blank sheet of paper! Check back with this blog in the near future when we tell you about our upcoming autonomous flight results.
- John Daly
John Daly is a Systems and Control Engineer at Quanser headquarters in Markham, Ontario, Canada



2 comments:
One question - Does this UAV configuration rely on the Optitrack camera system for external position feedback (as the QBall does) or have you created a navigation solution entirely from integrating the HiQ IMU outputs?
Good question - this UAV operates like the Qball in the sense that it requires external position measurement (either via OptiTrack or QUARC's Vicon block) to navigate autonomously. Of course, if one wanted to fly this UAV outside, we support a wide variety of GPS receivers that could also do the job of localization.
Post a Comment